Studenckie Koło Naukowe Dynamiki i Sterowania Maszyn i Urządzeń działa w zakresie: mechaniki teoretycznej, robotyki, dynamiki liniowej i nieliniowej, teorii mechanizmów i manipulatorów, sterowania, programowania układów mikroprocesorowych, wykorzystania sieci neuronowych i sztucznej inteligencji.
Nasze przedsięwzięcia
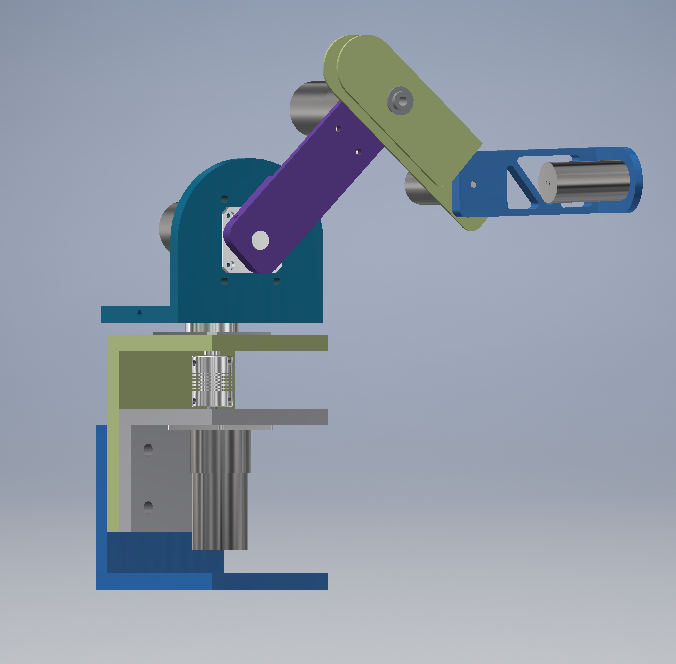
KIN-ARM MECHANICZNE RAMIĘ
Konstrukcja manipulatora przemysłowego typu IRB sterowanego m.in. przez Kinect. Zapewnia powtarzalność ruchów oraz intuicyjność obsługi.
NAPĘD OSCYLACYJNO-UDERZENIOWY
Działanie opiera się na pokonywania sił tarcia lub lepkości (występujących naturalnie w środowisku). Kapsułkowe urządzenie stosowane np. w endoskopii, wymaga przyłożenia niewielkiej siły potrzebnej do uzyskania ruchu
PASSIVE DYNAMIC WALKER
Urządzenie schodzące po równi pochyłej o niewielkim nachyleniu, chodem podobnym do ludzkiego, bez jakiegokolwiek napędu.
UKŁAD WTRYSKOWY CZTEROCYLINDROWY
Modernizacja motocyklu poprzez wprowadzenie układu wtryskowego wielopunktowego zamiast gaźnika.
Aktualności
Jeśli jesteś zainteresowany naszymi ostatnimi artykułami, sprawdź nasz blog. Nie masz nic do stracenia!
Informujemy Państwa, że przenieśliśmy się na www.sknartuditu.p.lodz.pl. Stary adres, tzn. www.artuditu.5v.pl będzie przekierowywał Państwa na nowy. Pozdrawiamy :)
{kind=link}
{kind=link}
{kind=link}
{kind=link}